Welcome to my Portfolio

My name is Valérian Grégoire--Bégranger, I’m an aerospace engineering student from IPSA Paris. Set to graduate this year, I am currently completing my end-of-studies internship in the GNC department of a joint french-german laboratory.
During my studies, I specialized myself in embedded and mechatronic systems with a minor in UAV automation. Additionnaly, I completed one semester in Istanbul (TR) where I focused primarily on AI, machine learning, and image processing.
The knowledge I acquired for the past 5 years made me the head of one of IPSA’s drone design associations. We participated into multiple UAV challenges which required us to both design and automate UAVs for practical applications.
This portfolio serves as a showcase for the skills I have developed throughout my studies, internships, and associative experiences.
IPSA Paris uses a project-oriented approach for its curriculum. This methodology allowed me to discover core engineering knowledge and learn how to apply it in practice, giving me a deeper understanding of how these systems operate in the real world. Throughout my studies, I translated this experience into a specialized skill set focused on embedded systems and drone GNC which includes :
Kalman Filtering
Controller Design and Tuning
Pathfinding & SLAM
PCB & Drone Design
SITL & HITL Simulation (Gazebo & PX4)
Real Time Operating Systems (ROS2, FreeRTOS)
Signal & Image Processing
Artificial Intelligence & Optimization
I code mainly in C/C++, Python, and MATLAB. Depending on the application, I can write high to low level codes to interface both with APIs, MCUs and hardware, and have basic FPGA experience both in Verilog and VHDL.
My Projects
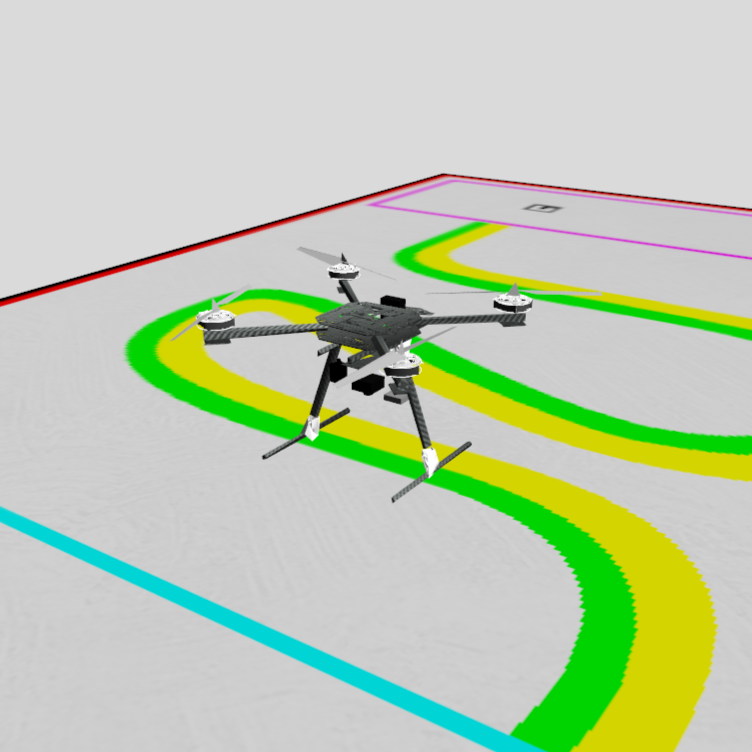
Software In The Loop Simulations
Using the combination of the PX4 autopilot, ROS2 and Gazebo, I setup and run simulations of custom environments to implement GNC algorithms. These simulations allow for quick and efficient prototyping before moving on to HITL and real-life integration.
SITL simulations are my prefered approach for any UAV related application, both for associative and professionnal work, as they can easily be integrated in real embedded systems while being risk-free.
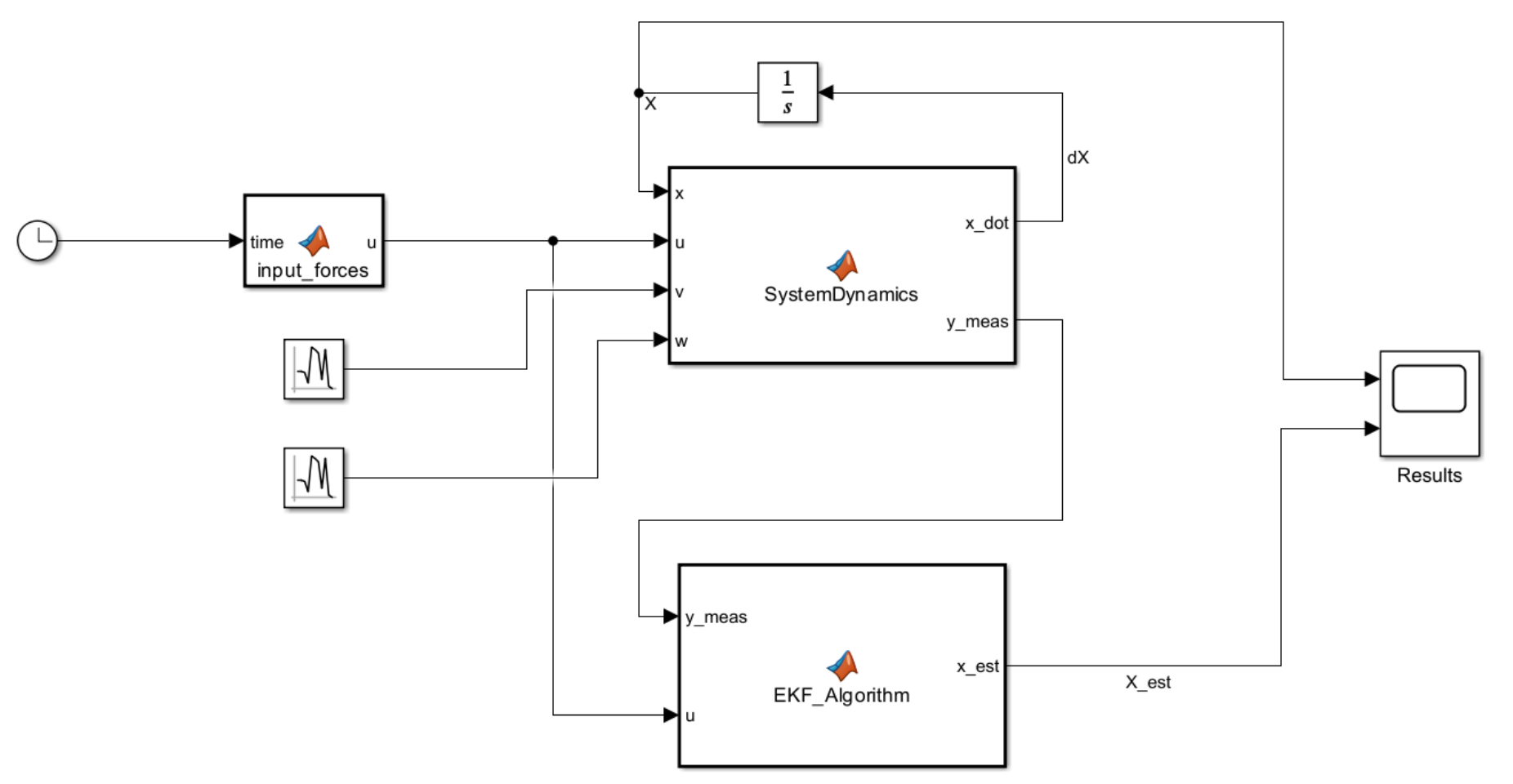
System Identification and Kalman Filtering
Real sensors suffer from noise which render dead-reckoning, the basic integration of their returned values over time, unusable in practice. The implementation of state observers such as Kalman Filters (mainly EKF) allow for the fusion of multiple sensors measurements to estimate the true state of a system.
Using a smartphone with an IMU and a magnetometer, I was able to estimate its attitude in quaternions using an Extended Kalman Filter in MATLAB.
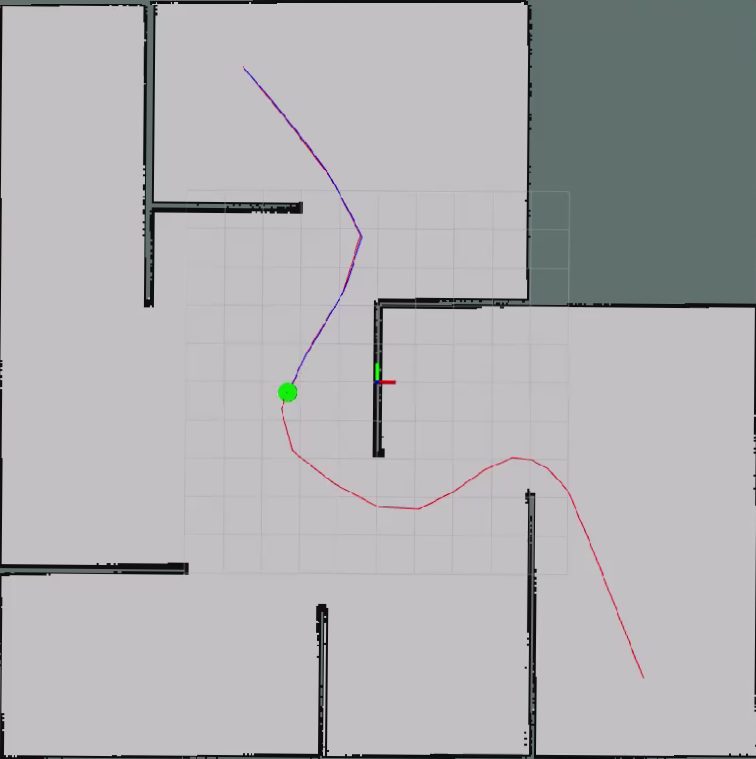
Pathfinding with RRT/BiRRT and Bézier curves
RRT algorithms are a great tool to find a path in an complex environment with N dimensions. Although the basic RRT algorithms only allow for the computation of paths for holonomic agents, they are the foundation for more complex RRT algorithms which take into account the dynamics and kinematics of the system to guide to its destination. These guidance algorithms work with all systems while remaining efficient enough for embedded applications. Their implementation was made using ROS2 in python with a map generated using the SLAM toolbox and a simulated 2D Lidar.
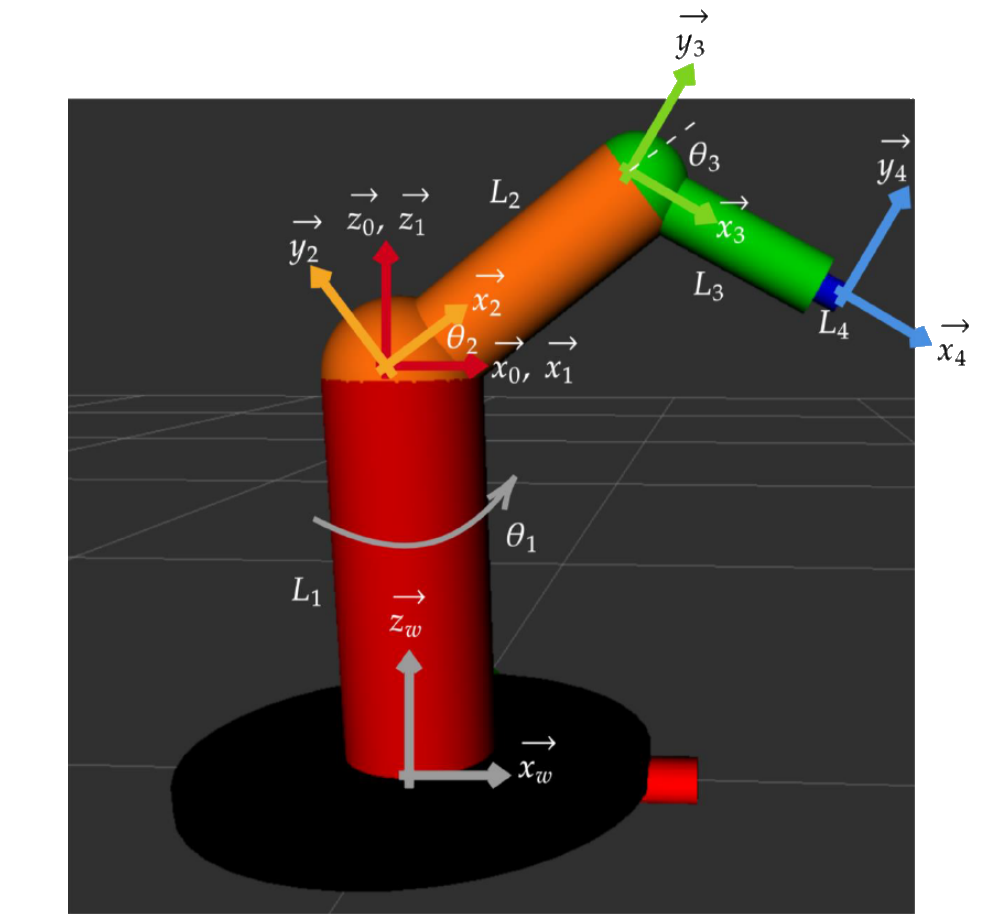
Inverse Kinematics in ROS2
3R manipulators and robotic arms are common assemblies used in the industry. Using the Denavit-Hartenberg parameters, forward and inverse kinematics of such systems can be implemented to allow for their control based on joints angles (forward kinematics) or end-effector position (inverse kinematics). Using RViz and ROS2, the implementation was straightforward and allowed for the validation of the algorithms. The 3R manipulator was modeled using URDF (Unified Robot Description Format) files for this specific application.
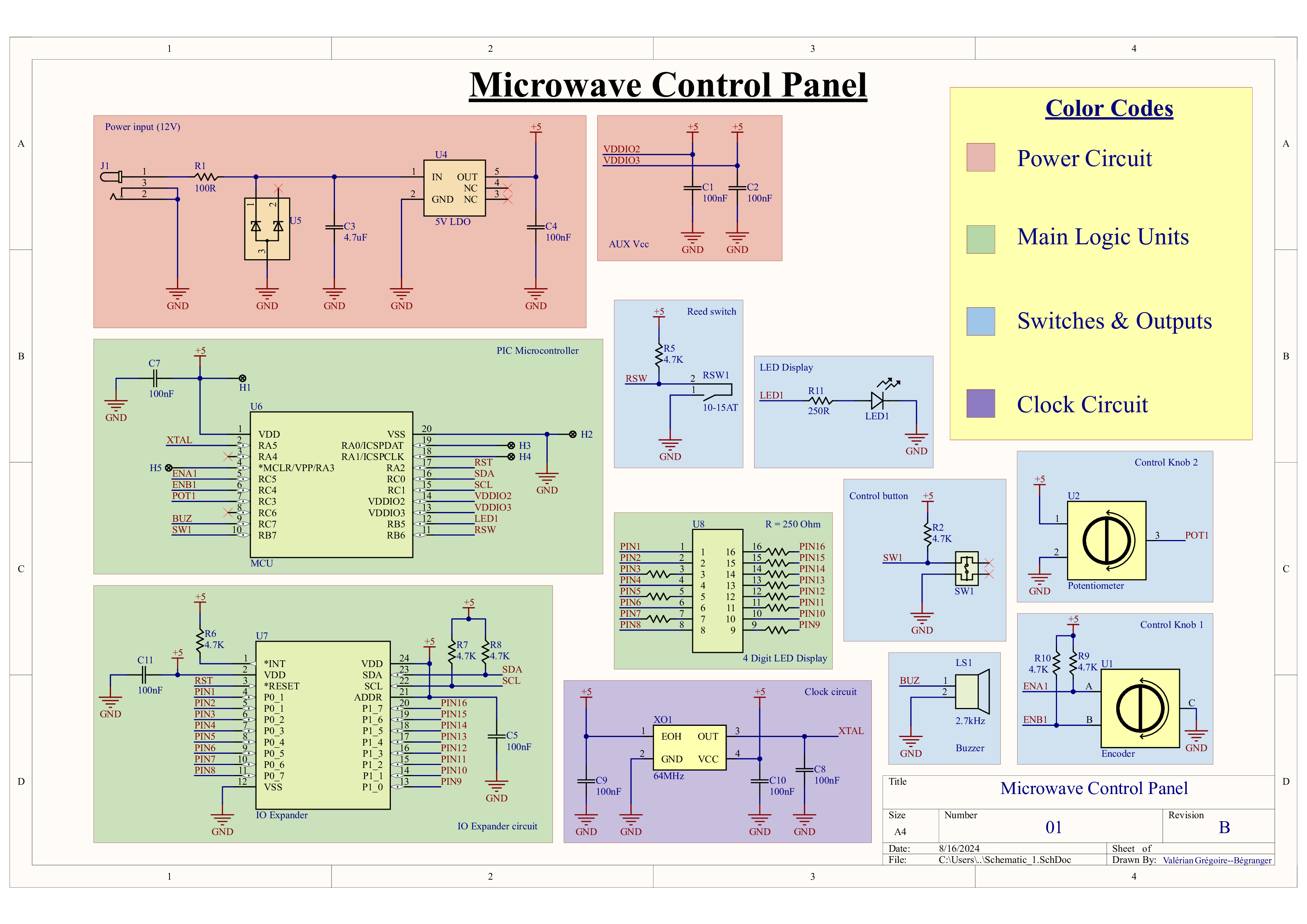
PCB Design
Embedded systems require companies to develop electronic circuits to simplify their production and assembly. By learning to use Altium Designer and KiCAD, I was able to design and solder a probe used on UAVs for research purposes during an internship.
Mastering the basics of PCB design allows me to shift my focus towards designing fully operational systems which match with EMF regulations.
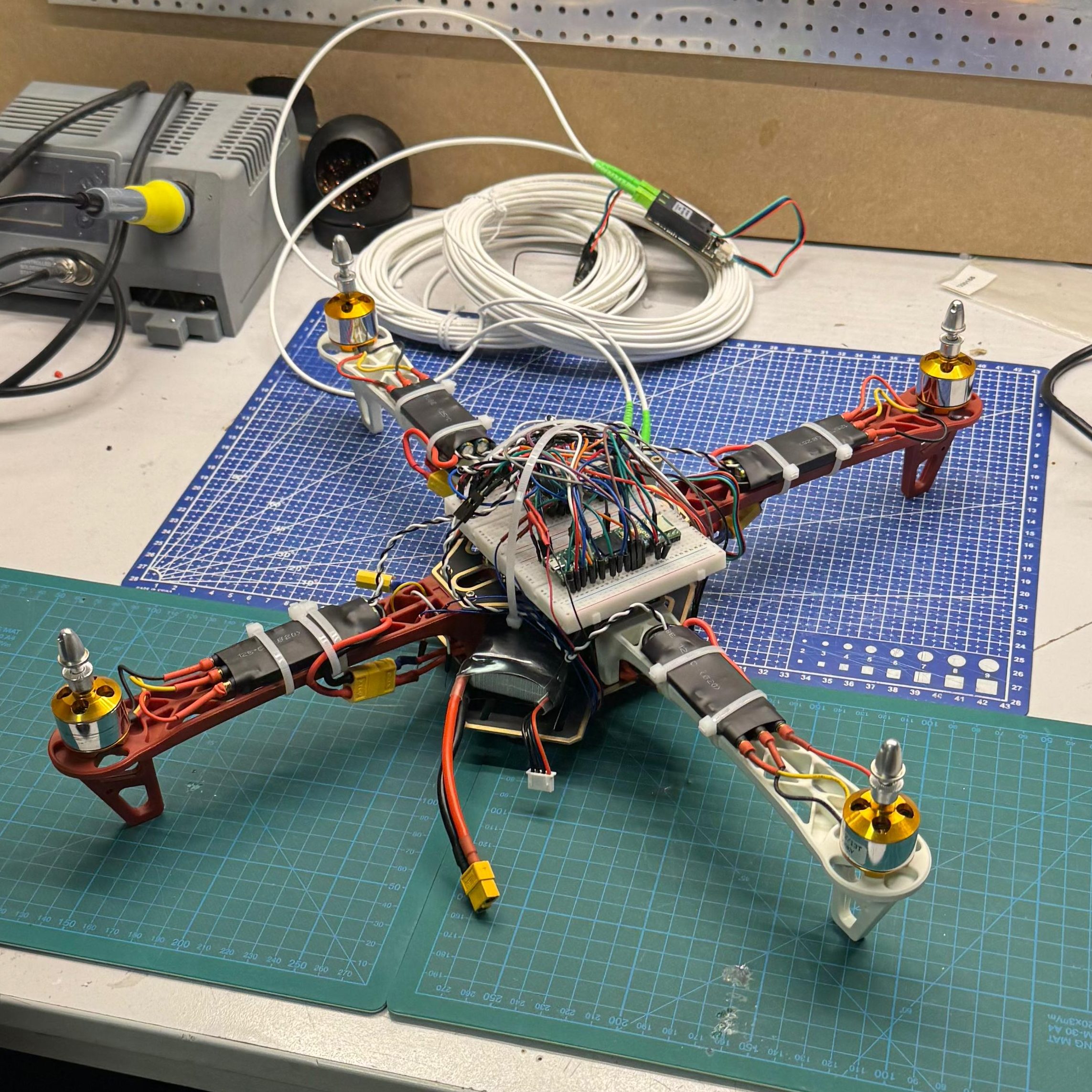
Semi-Autonomous UAV Design
End of studies at IPSA are marked by a project with a chosen subject. My team’s project was about the design and automation of a quadcopter using a Teensy 4.1 MCU with telemetry via fiber-optics. The UAV was equipped with an IMU, magnetometer, barometer, a lidar, and optical flow sensor. Using a Kalman Filter, the UAV would stabilize itself and follow velocity commands sent via telemetry. The algorithms were implemented using FreeRTOS for real-time operation.
